Project description SSRoverDAB+
Starting point
In Germany, precise GNSS corrections are provided by the SAPOS service of the Working Committee of the
Surveying Authorities (AdV) as part of the Open Data Initiative. To access and use the corrections, users
rely on mobile internet, a widely accepted transmission medium, as well as the RTCM 3.x correction data
format and the RTK positioning method.
Due to gaps in cellular network coverage, nationwide correction reception via mobile internet cannot be
guaranteed. In order to enable correction data reception even in mobile internet dead spots, commercial
service providers broadcast the corrections in parallel via geostationary satellites. Since the correction
data is available in the service provider’s proprietary format, the user needs a GNSS receiver from the
same provider.
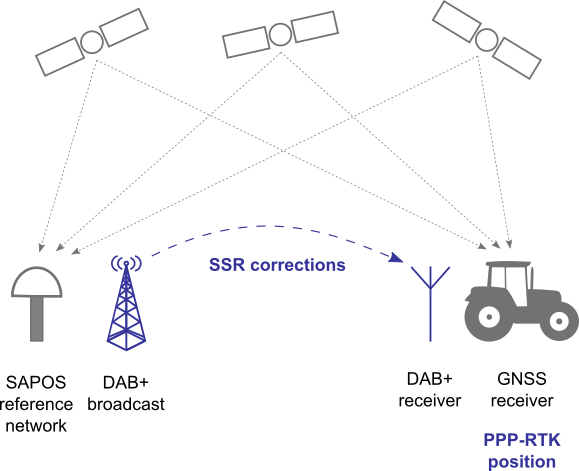
To expand the coverage area of the SAPOS service, parallel transmission of the precise correction
information via other data channels, such as DAB+, is preferred. To save data bandwidth and avoid loss of
accuracy during the broadcast process, the new PPP-RTK data delivery and positioning technique will be
used. Currently, neither an internationally standardised PPP-RTK data format, nor a commercial GNSS rover
system capable of processing the corrections are available.
Project goals
The project aimed to generate a broadcast-capable PPP-RTK correction data stream in an open data format
with optimised bandwidth based on an existing GNSS reference station network. In addition, a reliable DAB+
data transmission channel was established and precise real-time PPP-RTK positioning and sensor fusion
algorithms were developed and adapted. The Alberding
A10-RTK sensor was used
as a development and demonstration platform for extensive testing of the overall solution in practical
field tests.
Task
The following tasks were identified based on the assessment of the initial situation and the goals of
the project:
- Provision of a suitable PPP-RTK data stream in an open data format
- Provision of a data channel for broadcasting the PPP-RTK correction data
- Optimisation of the PPP-RTK data format and participation in its standardisation
- Development and optimisation of transmission and reception-side solutions for the GNSS correction data
delivery via DAB+ with error correction
- Provision and optimisation of a development and demonstration platform for mobile field tests and
subsequent product development
- Development of precise positioning solutions using PPP-RTK data and sensor fusion
- Performance of practical field tests to evaluate the solution under real conditions
The first two tasks were provided by the associated partners AdV, represented by the Bavarian Agency for
Digitisation, High-Speed Internet and Surveying (LDBV), and the Federal Agency for Cartography and Geodesy
(BKG). The associated project partner BayWa supported the definition of requirements and the practical
field tests.
Results
In general, the scope of the work can be divided into improvements in the DAB+ transmission infrastructure and developments for a user terminal that receives the
DAB+ transmissions and uses PPP-RTK corrections for cm-accurate positioning. On the GNSS infrastructure side, models for the transmission of regional ionospheric and
tropospheric parameters in dedicated time slots have been developed and the coding for the DAB+ transmissions has been optimised.
The majority of the work went into the development of software and system solutions for precise GNSS posi¬tioning using PPP-RTK corrections received from DAB+ transmissions.
The existing Alberding A10-RTK hardware was used as a test and evaluation platform for the software developments in the project. Three different positioning solutions using
PPP-RTK corrections were developed in the project and have been successfully implemented on the embedded PC inside the A10-RTK sensor.
For an optimal mobile DAB+ reception, a DAB+ receiver module has been developed, produced and tested with different antennas. To transform the positions from the roof
to the wheel of an agricultural machine, an algorithm using INS data was developed. Because of the INS sensor and the DAB+ receiver did not fit into the A10-RTK form factor,
new A10-DAB+ prototype sensors had been manufactured. The A10-DAB+ sensor combines all necessary components for the system functionality tests in one housing.
Practical field tests have been carried out successfully on agricultural machines in Bavaria. The A10-DAB+ sensor received PPP-RTK corrections via DAB+ transmissions,
converted the spacebased corrections into observation-based RTCM 3.2 MSM messages and transmitted the corrections to the integrated RTK rover on the machine. The corrections were
accepted by the rover and used by the automatic-steering system of the machine. The tractor terminal showed an RTK positioning accuracy of 1-2 cm.
As the principal usage of PPP-RTK transmission via DAB+ has been proven in the SSRoverDAB+ project, future efforts should also focus on the development of a combined
sensor solution that uses DAB+ modules which can be produced in quantities in a smaller form factor and at a lower price.
Detailed information can be found in the final presentation and in the press release on the project conclusion (German).
Project duration
05/2022 - 06/2023
Project funding
"SSRoverDAB+" was funded under the 2nd element of the
" Navigation Innovation and
Support Programme" of the European Space Agency ESA (ESA NAVISP Element 2). The programme aims to
develop innovative competitive products in satellite navigation and other areas of positioning,
navigation and timing.

↑ Back to top